{kind=link}
{kind=link}
{kind=link}
Project information
- Category: Robotics & Autonomy
- Project duration: Sep '25 - Dec '25
- Team size: 2
- Key Areas: SLAM, Navigation, Path Planning
- Github URL: WaveRover Repository
WaveRover: Navigation, SLAM and Coverage
Technology(s) Used: EKF (Kalman Filter), A* Search, YOLO, AprilTags, Computer Vision, Subsumption Architecture
- Waypoint Navigation & Visual Servoing: Developed a closed-loop controller for a wheeled robot using visual feedback. Performed camera calibration and distortion correction to improve pose estimation accuracy using AprilTags.
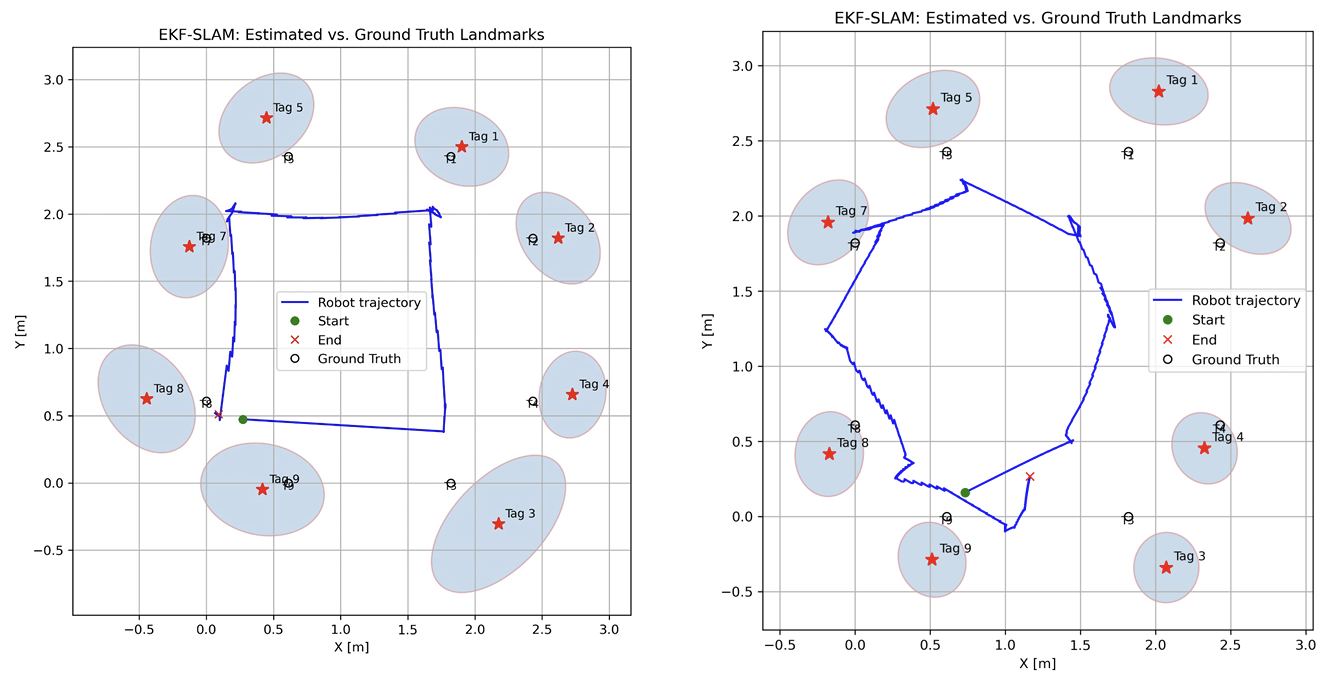
- SLAM Implementation: Built an EKF Kalman filter-based SLAM system to estimate robot pose and YOLO-detected landmark positions, utilizing Mahalanobis gating for data association.
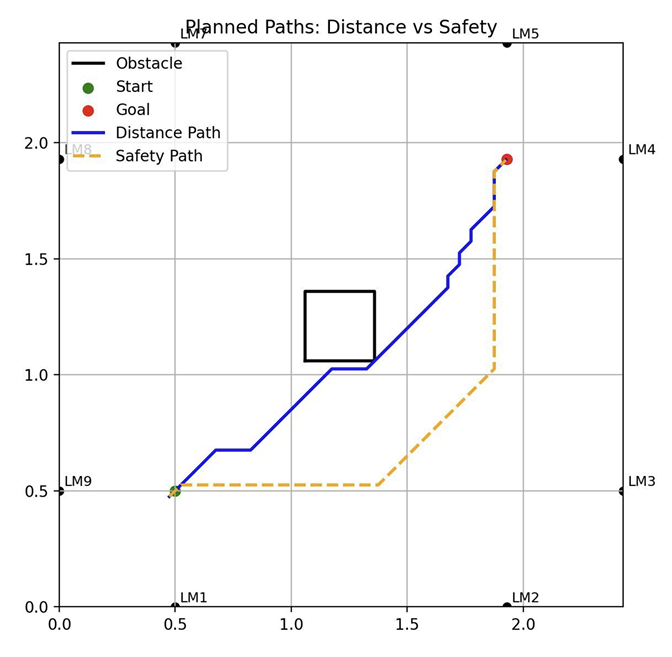
- Path Planning: Designed grid-based A* algorithms focused on two distinct behaviors: Maximum Safety and Minimum Time/Distance.
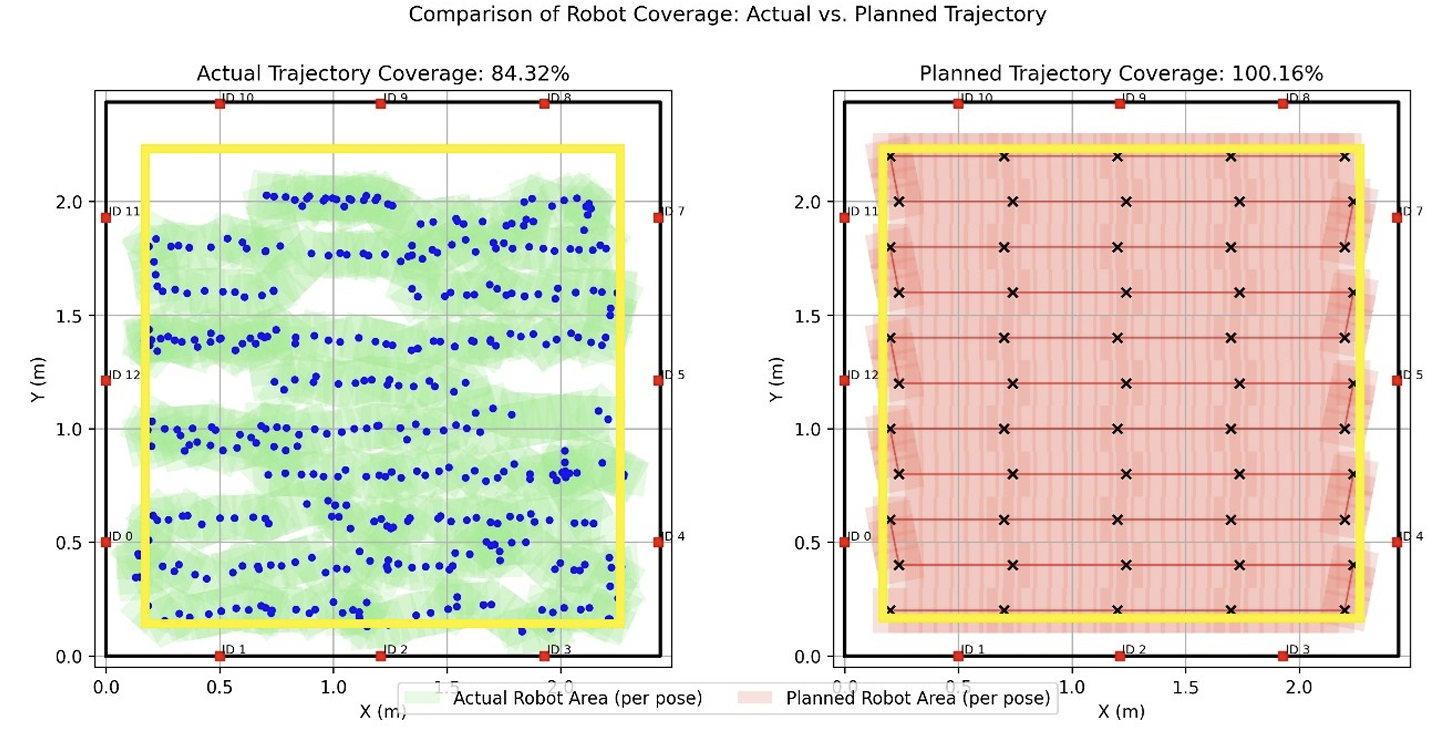
- Autonomous Coverage: Engineered a "Roomba-like" modular subsumption-based architecture for efficient area coverage and obstacle avoidance.